Taskography - Evaluating robot task planning over large 3D scene graphs
Conference on Robot Learning (CoRL) 2021
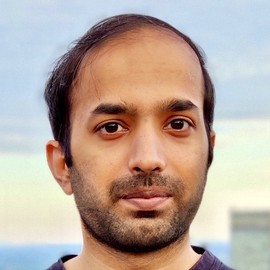
A 3D scene graph (3DSG) annotated with plannable attributes. |
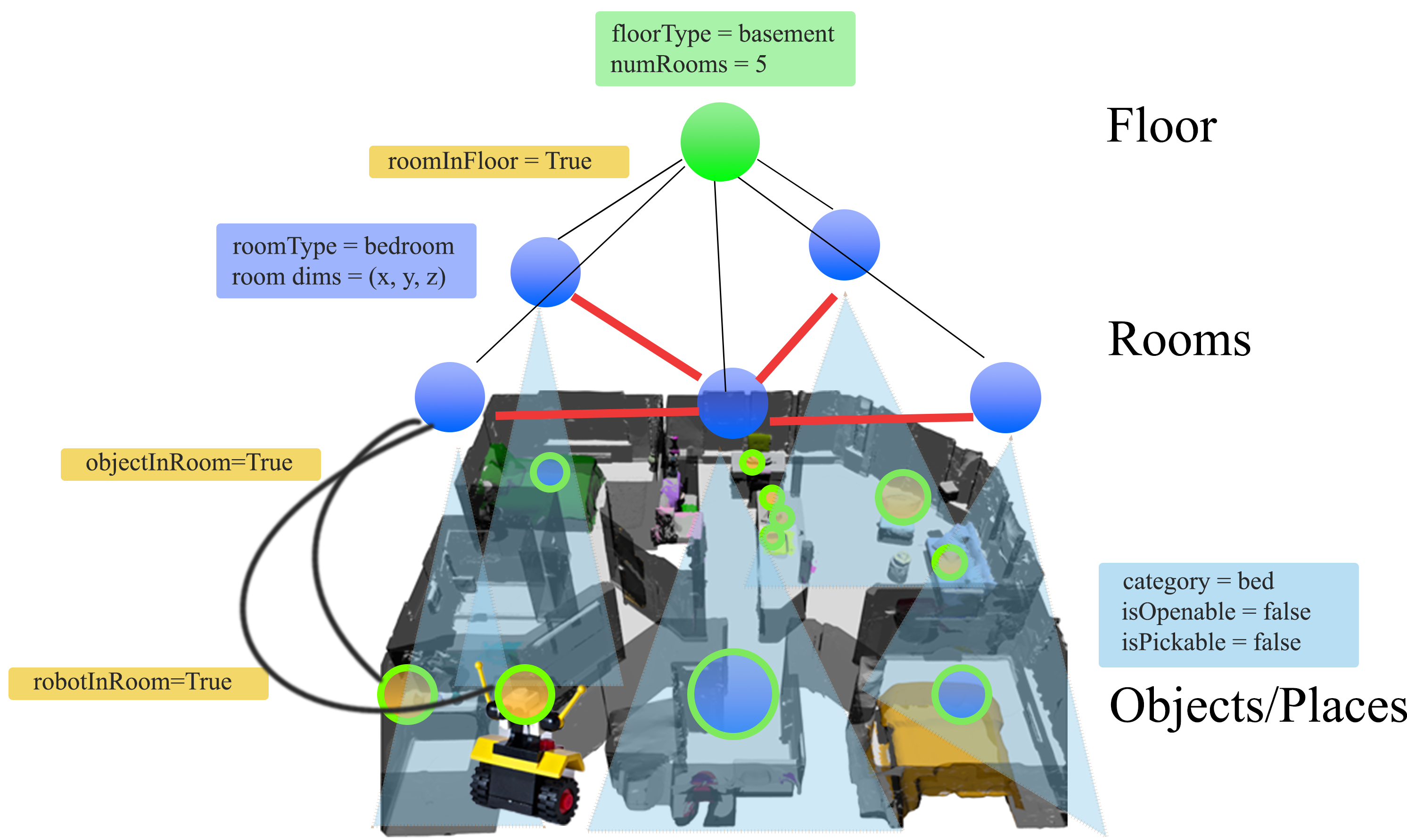
3D scene graphs (3DSGs) [1],[2] are an emerging description; unifying symbolic, topological, and metric scene representations. However, typical 3DSGs contain hundreds of objects and symbols even for small environments; rendering task planning on the full graph impractical. We construct Taskography, the first large-scale robotic task planning benchmark over 3DSGs. While most benchmarking efforts in this area focus on vision-based planning, we systematically study symbolic planning, to decouple planning performance from visual representation learning. We observe that, among existing methods, neither classical nor learning-based planners are capable of real-time planning over full 3DSGs. Enabling real-time planning demands progress on both (a) sparsifying 3DSGs for tractable planning and (b) designing planners that better exploit 3DSG hierarchies. Towards the former goal, we propose SCRUB, a task-conditioned 3DSG sparsification method; enabling classical planners to match (and surpass) state-of-the-art learning-based planners. Towards the latter goal, we propose SEEK, a procedure enabling learning-based planners to exploit 3DSG structure, reducing the number of replanning queries required by current best approaches by an order of magnitude. We will open-source all code and baselines to spur further research along the intersections of robot task planning, learning and 3DSGs.
Quick links

|
|

|
Tasks
| Rearrangement(k) | Courier(n, k) | Lifted Rearrangement(k)/Courier(n, k) |
|---|---|---|
| Based on the recently proposed rearrangement challenge [71], this task requires a robot randomly spawned to rearrange a set of k objects of interest into k corre- sponding receptacles. The robot often needs to execute multiple other actions along the way, such as opening/closing doors, navigating to goals, planning the sequence of objects to visit, etc. | A robot that couriers objects is equipped with a knapsack of maximum payload capacity of n units. The robot needs to locate and courier k objects (of varying weights w ∈ {1, 2, 3} units) to k distinct delivery points. The knapsack can be used to stow and retrieve items in random-access fashion; effectively embedding a combinatorial optimization problem into the task. Stow and retrieve actions increase branching, necessitating far deeper searches. | We also provide lifted variants of these tasks. Here, goals are specified over desired object-receptacle class relations (e.g., “put a cup on a table”) as opposed to over object instances (e.g., “put this cup on the table”). These tasks introduce ambiguity in both the search of classical task-planners and learning-based techniques, which must now distinguish object instances of relevant classes. |
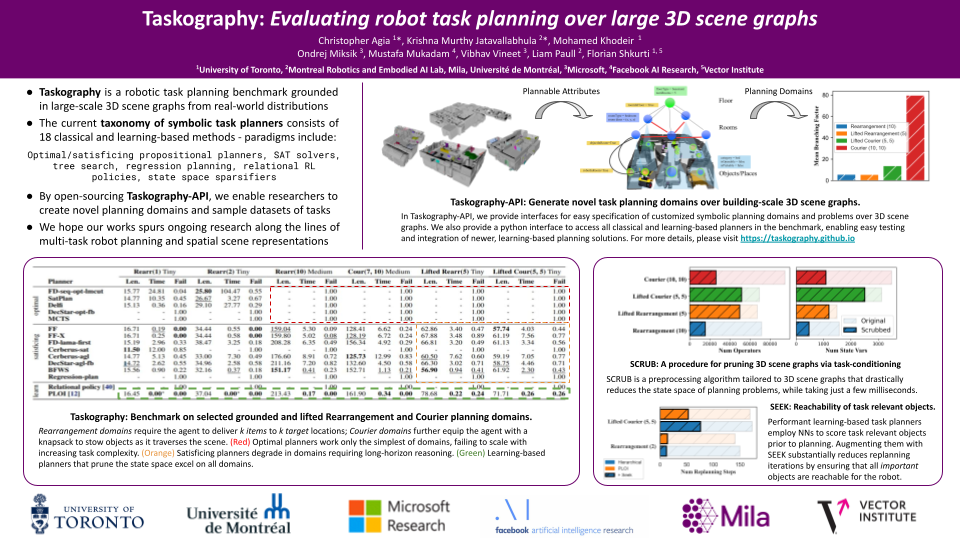
Benchmark
TASKOGRAPHY benchmark results on select grounded and lifted Rearrangement (Rearr) and Courier (Cour) 3DSG domains. Planning times are reported in seconds and do not incorporate planner-specific domain translation times (factored into planning timeouts). A ‘-’ indicates planning timeouts or failures (10 minutes for optimal planners, 30 seconds for all others). Results are aggregated over 10 random seeds - see supplementary for standard deviations and results across all 40 domains. Optimal task planning is infeasible in larger prob- lem instances or for more complex domains, while most satisficing planners are unable to achieve real-time performance. PLOI, a recent learning-based planner consistently performs the best across all domains.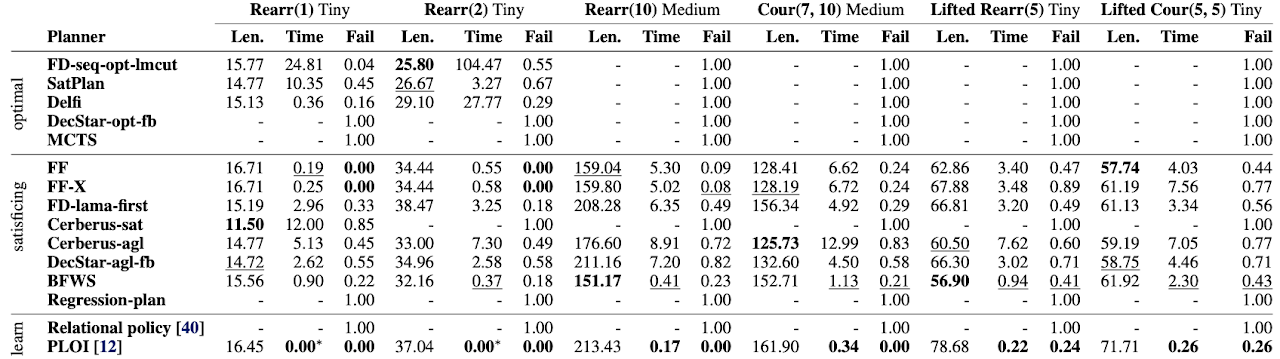
Citation
@inproceedings{agia2022taskography,
title={Taskography: Evaluating robot task planning over large 3D scene graphs},
author={Agia, Christopher and Jatavallabhula, {Krishna Murthy} and Khodeir, Mohamed and Miksik, Ondrej and Vineet, Vibhav and Mukadam, Mustafa and Paull, Liam and Shkurti, Florian},
booktitle={Conference on Robot Learning},
pages={46--58},
year={2022},
organization={PMLR}
}